This Week We
- Made a tool for segmenting training data
- Experimented with using an SVM for segmentation
- Worked on stuff for easily segmenting/labelling planes in PCL
- + distinguishing things “on top” of the plane from the plane itself
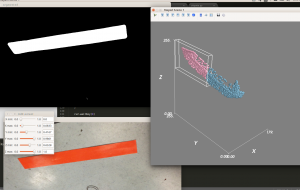
The training tool: The plot on the right is HSV->XYZ. You draw a box around the desired color groups, and use the resulting segmentation.
This is less annoying than manually drawing on images.
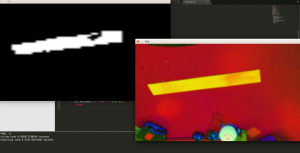
A SVM was trained on the segmentation data and it ran in ~near~ real-time on a super downsampled input image.
This is one frame of the SVM running on the video. It was just a 2-second demo, the threshold segmentation looks a lot better.
Sci-kit learn’s svm implementation struggles to fit at more than 10k samples, which is another problem.